


LiDAR tools for Ardu and PX4 vehicles
Point-of-interest (POI) for M350, M300, M30, M3E
Support for DJI M350
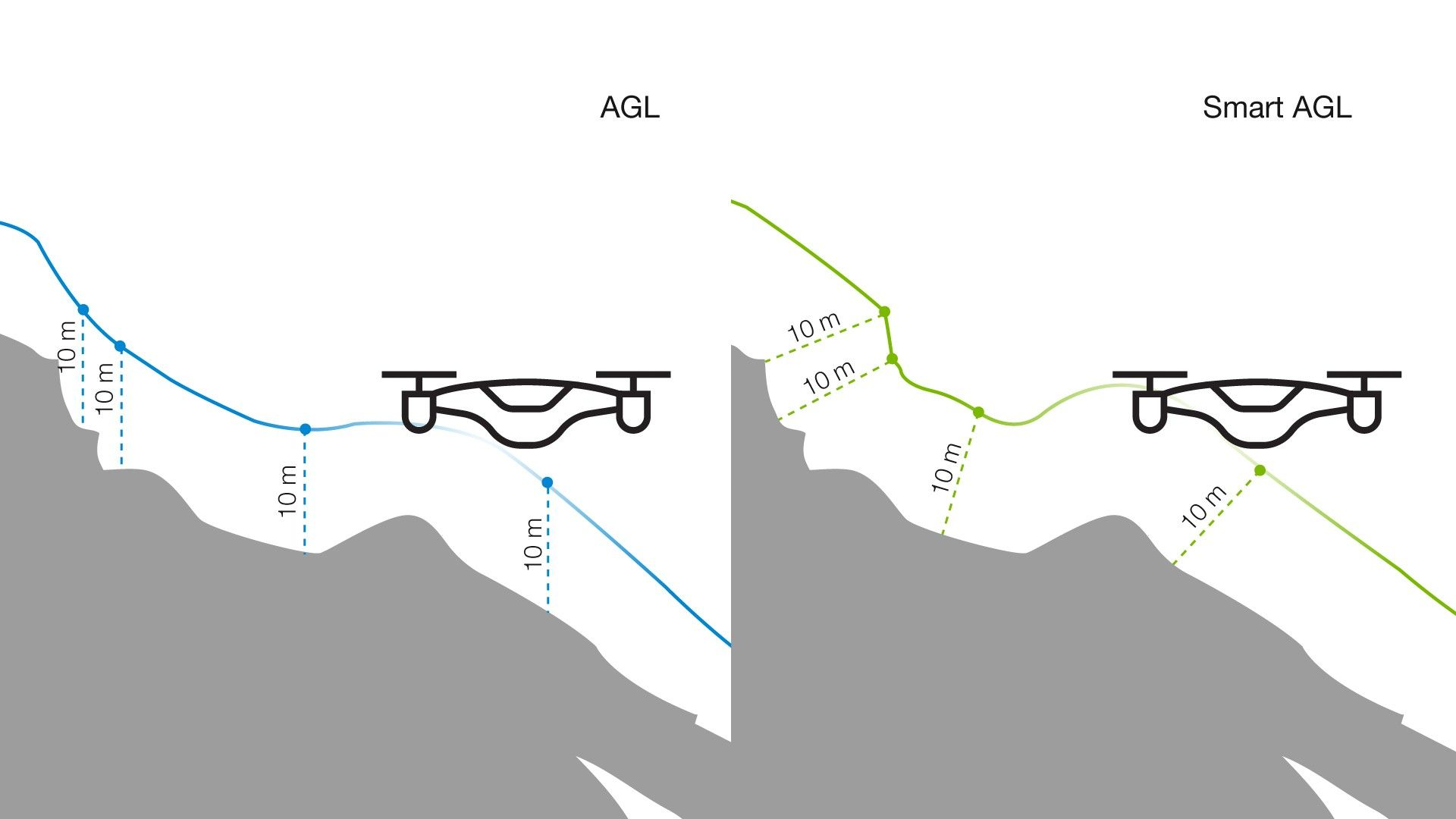
New terrain following mode - Smart AGL
Adjustable corner radius


.gif)










.gif)


.png)
.png)

If you have Ardupilot VSM installed, make sure it is stopped in the Service Manager and “Autostart” is disabled when using AltaX or another PX4 drone. Otherwise, ArduPilot VSM and PX4 VSM may conflict.

.png)
.png)
Camera profile fixes:




From now on, UgCS automatically starts data recording on DJI Zenmuse L1 at the first waypoint of a 'Lidar area' (or 'Lidar corridor') segment and stops data recording at the last waypoint of the segment. A corresponding icon is displayed in the hint for the first and the last waypoint of the segment:

Also, if it is required to start/stop data recording at a specific waypoint, it can be done using the new 'lidar recording control' action - which isavailable for waypoints only.

Additional hints will help to avoid common mistakes during mission planning for LiDAR.
In future each newly created 'Lidar corridor' or a 'Lidar area' segment has the 'Set camera attitude' action with 'Tilt'=90. It is possible to change or remove this action if special settings required.
Profiles of 'DJI Zenmuse H20/H20T', 'DJI Zenmuse L1', 'DJI Zenmuse P1' are attached to the 'DJI Matrice 300' profile. New users don't have to attach them manually.

Export options for altitude when exporting a route as a KML:
LiDAR corridor:

For 'Lidar Area' and 'Lidar Corridor' tools:
Minor bug fixes.
Issues with Corridor mapping and LIDAR corridor tools
Issues with LIDAR area tool
Issue with the calculation of a route due to error "Automatic calculation of camera trigger distance is not supported for this algorithm."
Minor bug fixes
New tools for LIDAR surveying for UgCS ENTERPRISE license
“Lidar area” and “Lidar corridor” tools, although look similar to “Photogrammetry” and “Corridor”, provide additional functionality unlocking the full potential of LIDAR surveying:
The new command “Pattern” simplifies LIDAR calibration. It can be executed before/after executing a mission and at any time in the middle. UgCS supports the two most popular IMU calibration patterns: U-figure and Eight. You can change pattern size, altitude, and flight speed if required.
Note: The “Pattern” command and the “Corner radius” parameter require UgCS for DJI 2.30 or newer.







- For DJI M300 the 'Eight' calibration pattern is made smoother.
- From now on, the UAV doesn't change its heading while executing U-pattern.
EXPERIMENTAL Feature Added
- Switching between thermal and visual views doesn't work. Workaround: switch to the DJI Pilot, change the view then go back to UgCS for DJI.
- In the thermal view, the color scale is not adjustable.
- When user pressed 'Pause' button on the remote controller and then also 'Pause' icon in the app - the icon was not changed to 'Play'.
- Sometimes user needs to give the 'Land' command twice to achieve the UAV to start landing.
EXPERIMENTAL Feature Added
- The ability to provide “Corner radius” parameter for a route segment (for segments that don't have the “Corner radius” parameter, the “Max corner radius” parameter of the mobile app settings is used).
- Pattern command with U-figure and Eight patterns for LIDAR calibration.
- Unable to continue the paused mission.
- 'Unknown' error occurs when the "Pause" button is pressed two times during flying to the same waypoint.
- In some cases, the DJI M300 does a curved flight (instead of straight) between the first and second waypoints of the route.
- Unable to continue the mission after “Click & Go" command.
If you have technical questions, feature suggestions or want to report an issue, please fill in the form.

